

Animated Switching Layout
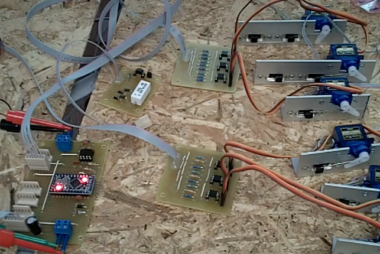
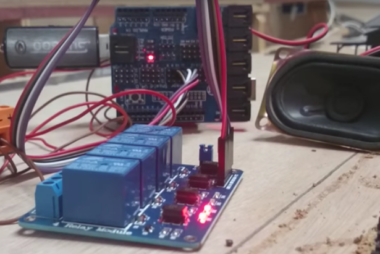
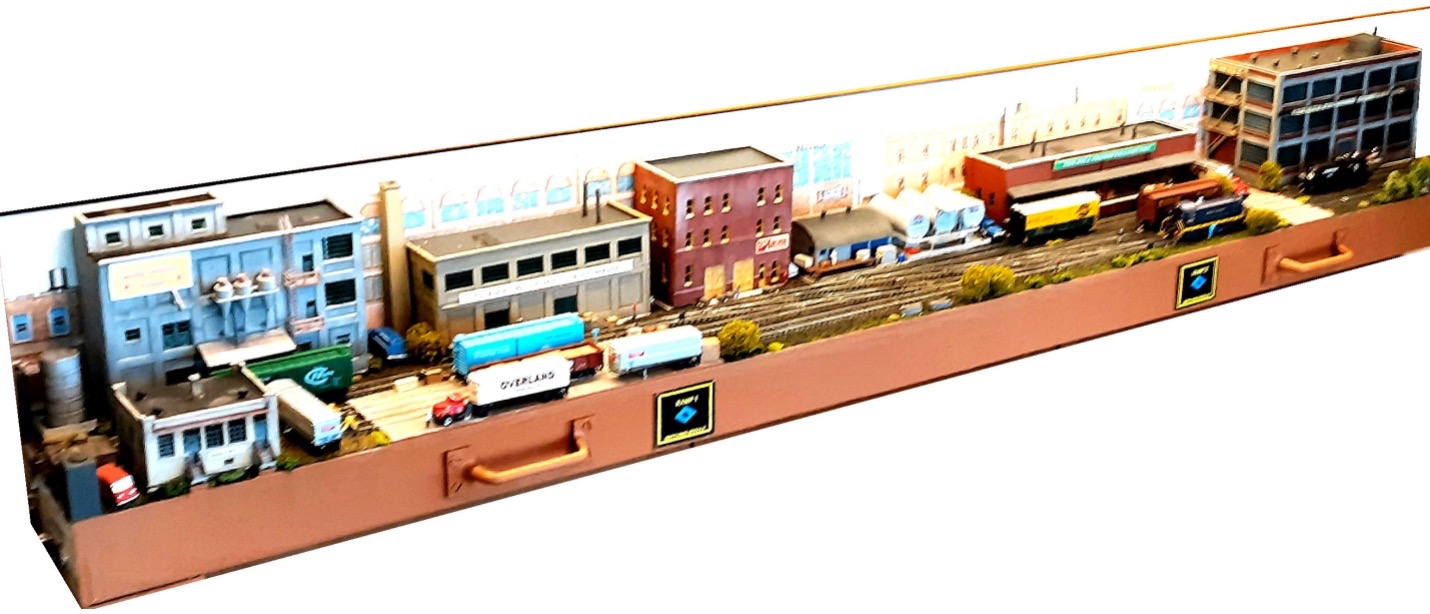
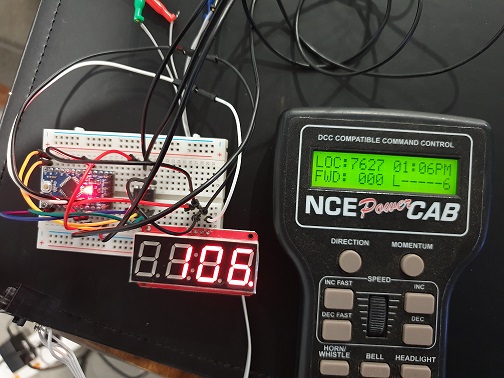
Fred Miller, MMR has created an amazing Animated DCC Switching Layout that is fully controlled by Arduino’s and is described in an article: N-Scale Animation Project he’s written. He explains how the different aspects work and provides detailed instructions on how you can construct your own modules. He’s also created some YouTube videos showing the…



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}